| Table1. Daily Coordinate Repeatabilities of Each Analysis Group. | |||||
| Computing center | Software | RMS residuals (mm) | |||
| North | East | Up | |||
| 1994 Campaign | |||||
| DEOS | (6 days) | GIPSY | 3.2 | 6.9 | 9.5 |
| ENS | (5 days) | GAMIT | 3.5 | 4.9 | 8.8 |
| GFZ | (5 days) | EPOS | 3.6 | 6.3 | 8.7 |
| BKG | (5 days) | BERNESE | 4.0 | 6.9 | 10.3 |
| 1996 Campaign | |||||
| DEOS | (9 days) | GIPSY | 3.2 | 6.7 | 10.1 |
| ENS | (9 days) | GAMIT | 3.3 | 6.0 | 8.5 |
| GFZ | (9 days) | EPOS | 3.0 | 6.3 | 8.1 |
| BKG | (5 days) | BERNESE | 3.1 | 4.8 | 9.5 |
| Please note that not all groups processed the additional campaign days. Inclusion of these smaller networks in 1996 slightly degraded the repeatability, but this was necessary because a few sites could not be occupied during the offical campaign days. ENS also resolved the phase ambuigities in their solutions, which shows up in the east component of the coordinate repeatabilities. Therefore, these values should not be interpreted as a direct measurement of the performance of each GPS software. | |||||
| Table2. Internal consistency of the Campaign Averaged Coordinate Solutions | |||
| GPS Measurements Campaign | RMS residuals (mm) | ||
| North | East | Up | |
| GEODYSSEA-94 | 1.9 | 3.8 | 7.4 |
| GEODYSSEA-96 | 2.5 | 5.0 | 6.6 |
| Table3. Initial results network solution mapping in ITRF-94 | ||||||||
| IGS Station | 1994 Solution (1) | 1996 Solution (2) | ||||||
| North | East | Up | North | East | Up | |||
| Kitab | 2.1 | -4.2 | 1.2 | 14.6 | -0.7 | 17.4 | ||
| Tidbinbilla | -0.8 | -4.6 | -3.3 | 9.0 | 4.5 | 27.9 | ||
| Tsukuba | -10.5 | -3.2 | -5.3 | 20.3 | -17.1 | -9.6 | ||
| Yarragadee | -5.1 | 6.0 | -2.3 | 11.4 | -6.1 | -1.7 | ||
| Taiwan | 7.2 | -0.6 | 7.2 | -19.9 | 13.8 | -15.0 | ||
| Coordinate residuals (in millimeters) after transformation w.r.t. (1) the ITRF-94 coordinates and (2) the ITRF-94 velocity constraints used between the 1996 and 1994 campaign epoch. Please note that for Kitab, velocity values were set according to the NUVEL-1A model, because it is not available from ITRF-94. A DORIS value is available in ITRF-94 but the NUVEL-1A velocities showed better agreement with the GPS velocities obtained by the major analysis centres. | ||||||||
| Table4. Final results network solution mapping in ITRF-94. | ||||||||
| IGS Station | 1994 Solution (1) | 1996 Solution (2) | ||||||
| North | East | Up | North | East | Up | |||
| Kitab | 4.8 | -7.1 | 5.8 | 8.2 | 16.7 | 9.1 | ||
| Tidbinbilla | -1.4 | -5.0 | -1.4 | -1.3 | 7.2 | 21.7 | ||
| Tsukuba | -5.2 | -1.7 | -2.9 | 5.8 | -10.8 | -19.5 | ||
| Yarragadee | -1.5 | 5.8 | 0.2 | 4.4 | -1.9 | -5.6 | ||
| Taiwan (free) | -12.3 | 0.4 | -9.7 | - | - | - | ||
| Coordinate residuals (in millimeters) for (1) and (2) as described in Table 3. The additional 6 IGS stations were not used in the final transformation as their coordinate solution is less accurate due to the scarcity of the global stations that were included. | ||||||||
| Table5. Final results network solution mapping in ITRF-96. | ||||||||
| IGS Station | 1996 Solution (1) | 1994 Solution (2) | ||||||
| North | East | Up | North | East | Up | |||
| Cocos Island | 7.5 | 9.7 | 9.9 | 6.3 | 9.5 | -5.7 | ||
| Kitab | 5.8 | 20.6 | 0.1 | 8.9 | 3.6 | 12.2 | ||
| Taiwan | 4.7 | -4.5 | -10.6 | -9.5 | 3.8 | -14.5 | ||
| Tidbinbilla | -4.0 | -4.8 | 15.0 | 1.6 | 9.5 | 22.5 | ||
| Tsukuba | 4.9 | -8.2 | -1.6 | 9.3 | -14.7 | -3.3 | ||
| Yarragadee | -2.8 | -2.8 | -4.2 | 7.0 | -9.0 | 1.8 | ||
| Coordinate residuals for the 6 IGS stations included in the GEODYSSEA coordinate solutions (in millimeters) after transformation w.r.t. (1) their ITRF-96 coordinates and (2) the ITRF-96 velocity constraints used between the 1996 and 1994 campaign epochs. | ||||||||
 |  |  |
| Plate 1 : GEODYSSEA velocities in ITRF94 reference frame | Plate 2 : GEODYSSEA velocities in ITRF96 reference frame | Plate 3 : Comparison of GEODYSSEA velocities in ITRF94 and ITRF96 reference frames |
| | |
| Table 6 : GEODYSSEA velocities in ITRF94 reference frame | Table 7 : GEODYSSEA velocities in ITRF96 reference frame |
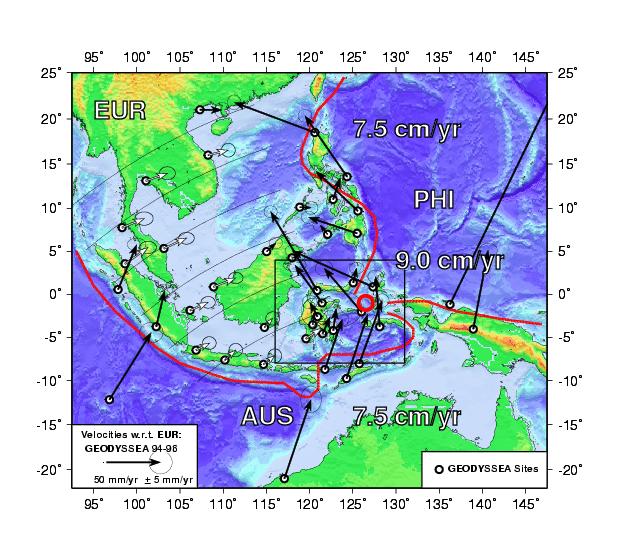 | 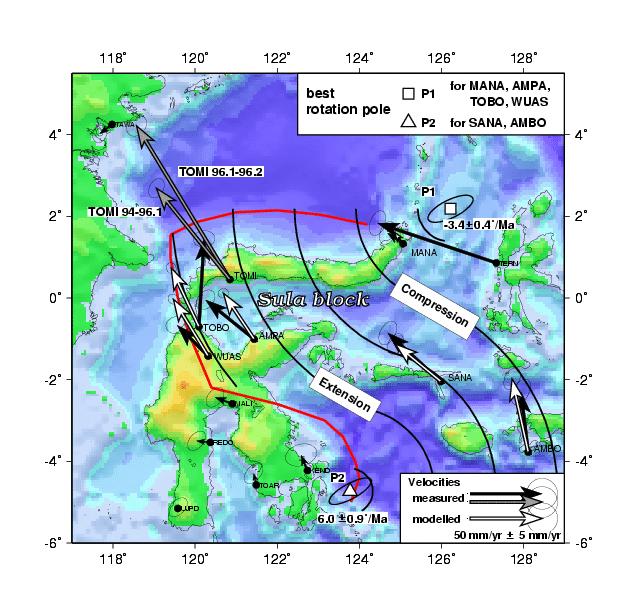 |  |  |
| Plate 4 : The Sunda block rotation. Sunda block stations velocities are depicted by white arrows. They are representative of the rotation of a rigid plate about a pole situated south of Australia. | Plate 5 : Complex tectonic of the highgly deformed Sula block in the triple junction area (Sulawesi, Indonesia). | Plate 6 : Strike-slip shear deformation zone across the Palu-Koro fault in Sulawesi, Indonesia). The deformation accumulated across the fault is not constant with time, but rather increasing after the 1996 January 1st magnitude 8 earthquake which happened up north on the Minahassa trench. | Plate 7 : Velocity profile across the Palu-Koro fault. The fault is locked on depth of arond 6-10 km, and shows a far-field velocity up to 42 mm/year (see modelisation). |