GPS : COMMENT ET POUR QUOI FAIRE ?
Qu'est-ce que le GPS ?
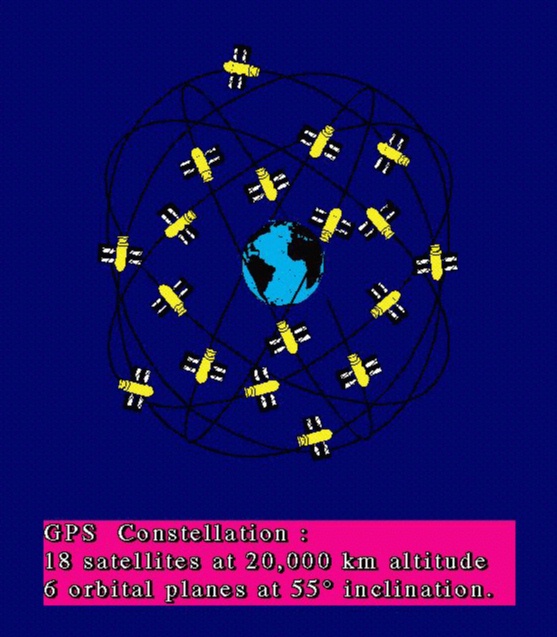
Dès la fin des années 70, l'un des principaux soucis du "Department of Defense" (DoD)
américain est de concevoir un système permettant à tous les éléments de l'armée américaine (avions,
navires, véhicules blindés, troupes) de se positionner de manière précise et quasi instantanée, n'importe
quand et n'importe où à la surface de la Terre. Le "Global Positioning System" (GPS) a donc été conçu
pour répondre à ces impératifs.
|

Le lancement d'un
satellite GPS
|

Un satellite GPS
|
Applications grand public
Applications scientifiques
Pour la majeure partie des applications du GPS en géophysique on ne saurait se satisfaire de la
précision atteinte par les mesures de pseudo distances. En effet, pour la tectonique des plaques par
exemple, il est nécessaire de mesurer des positions au centimètre près (voire au millimètre près) si l'on
veut être à même de déceler des déplacements de quelques centimètres par an (voire moins) sans avoir à
attendre des centaines d'années. La technique consiste alors à effectuer les mesures de distances
satellites-stations directement sur l'onde porteuse de chaque signal GPS (mesures de phase). Le principe
est similaire à celui de la mesure à partir du code de pseudo distance. Néanmoins, la longueur d'onde, ou
taille caractéristique, du signal est considérablement réduite, ce qui permêt d'atteindre une précision
centimétrique.
Pour une théorie mathématique détaillée du traitement des mesures GPS (d'après R.W. King et al., 1985).....
|

L'ambiguité du signal GPS
|
Phénomènes affectant la précision des mesures de phase
En dehors de la dégradation volontaire du signal par les militaires américains, il y a un certain
nombre de facteurs "naturels" qui limitent la précision du GPS. On peut citer dans l'ordre de leur
influence : la réfraction dans l'ionosphère, la réfraction dans la troposphère, la précision du
positionnement des satellites GPS, les phénomènes de multitrajets, et la position du centre de phase des
antennes GPS. Certains de ces phénomènes sont à peu près contrôlés, d'autres le sont moins, voire pas
du tout.
la réfraction dans l'ionosphère
Comme son nom l'indique, l'ionosphère est une enveloppe constituée de particules chargées
(ions) qui orbitent autour de la Terre au delà de 20 km d'altitude. L'onde porteuse du signal GPS doit
donc traverser cette couche sur son trajet entre le satellite et la station. Le fait que cette couche ne soit
pas neutre entraine une perturbation de la vitesse de toute onde électromagnétique qui se propage en son
sein. L'amplitude de cette perturbation est liée à la longueur d'onde et à la densité de particules chargées
dans le milieu traversé, laquelle densité est évidemment inconnue et variable dans le temps et dans
l'espace. Le temps de propagation de l'onde GPS va donc être modifié d'une quantité inconnue, nommée
délai ionosphérique, et pour finir l'évaluation de la distance entre le satellite et la station sera donc
erronée.
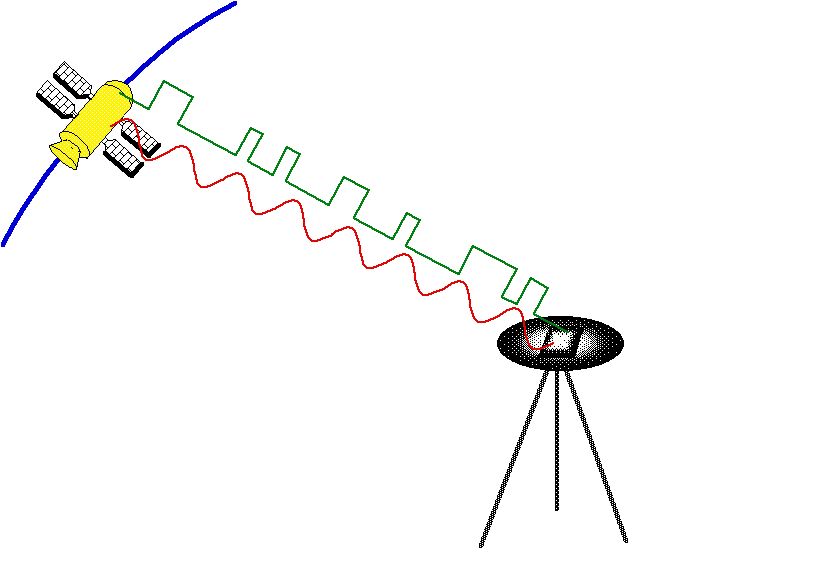
La solution consiste à émettre deux ondes sur deux fréquences différentes. Chacune d'elle sera
donc affectée d'une quantité différente, et la comparaison donnera une évaluation raisonnable du délai
ionosphérique pour chaque longueur d'onde. C'est pour cette raison que le système GPS est "bicolore",
c'est à dire qu'il émet sur deux fréquences légèrement différentes (1.575 GHz et 1.228 GHz). Il n'en
reste pas moins que dans le cas d'une ionosphère très agitée, en cas de tempête solaire par exemple,
l'évaluation du délai ionosphérique ne sera qu'approximative et la mesure moins précise.
la réfraction dans la troposphère
De la même façon, le temps de propagation de l'onde GPS est affecté par la teneur en vapeur
d'eau de la couche basse de l'athmosphère (de 0 à 10 km d'altitude) : la troposphère. Il serait donc
nécessaire de connaitre cette quantité avec précision tout le long du trajet suivi par l'onde. En pratique
cela se révèle très difficile, sinon impossible, même avec l'aide des deux fréquences. En effet, le retard
introduit est plus compliqué qu'un simple rapport de proportionnalité avec le pourcentage de vapeur
d'eau. La différentiation entre les deux fréquences n'apporte donc pas l'information souhaitée : le délai
troposphérique. Il existe plusieurs techniques pour contourner cette difficulté, aucune n'apportant de
solution vraiment satisfaisante. La plus simple consiste tout simplement à introduire une nouvelle
inconnue dans les calculs : le délai troposphérique de chaque station. Toutefois, comme ce paramètre
évolue en fonction de la météorologie locale, il est nécessaire de modifier ce paramètre au cours du
temps (toutes les deux heures par exemple). Cela finit par introduire beaucoup d'inconnues, ce qui rend
les calculs instables et les solutions moins fiables.
En pratique, ce problème prend d'autant plus d'importance que les conditions météorologiques et
les épaisseurs troposphériques sont différentes entre deux stations. La ligne de base entre une station
située en bord de mer (à altitude zéro) avec un degré d'hygrométrie important et une station située en
haute montagne avec un air très sec, sera particulièrement affectée. Enfin, cette erreur se retrouvera plus
particulièrement sur la composante verticale de la ligne de base, les erreurs horizontales se compensant
plus ou moins du fait que les satellites couvrent à peu près toutes les directions l'horizon. Du point de
vue théorique, des instruments permettant de mesurer directement la teneur en vapeur d'eau le long du
trajet suivi par l'onde GPS sont en phase expérimentale. Il est encore trop tôt pour savoir si la précision
de ces mesures, basées sur la température de brillance du ciel, sera suffisante.
la précision des orbites des satellites GPS
Il est évident que si l'on se trompe d'une certaine quantité sur la position du satellite émetteur,
cette erreur va se répercuter directement sur la position de la station receptrice. La distance entre deux
stations (ligne de base) sera moins affectée, la plus grosse partie de l'erreur étant éliminée par
différentiation. Néanmoins, l'arithmétique veut que l'erreur proportionnelle sur l'orbite est égale à
l'erreur proportionnelle sur la ligne de base. L'orbite des satellites GPS peut être calculée très
précisemment, mais elle est rendue publique par les militaires américains avec une précison de l'ordre de
200 m. Sur 20000 km cela donne une erreur proportionnelle de 10-5 (10 ppm), soit une erreur de 10 cm
sur une ligne de base de 10 km ! Cette erreur est totalement inacceptable pour le positionnement précis.
Il est donc nécessaire de recalculer les orbites des satellites GPS à l'aide de programmes informatiques
d'orbitographie. Ce faisant, on arrive à contraindre l'erreur d'orbite à environ 20 cm, soit 10-9 (1 ppM),
ce qui ne donne plus qu'une erreur de 1 mm pour une ligne de base de 1000 km de long.
les multitrajets
Ces phénomènes sont parmi les plus difficiles à appréhender. Il est clair que tout objet réflecteur
placé dans le voisinage de l'antenne de la station GPS, peut renvoyer une partie du signal provenant du
satellite sur cette antenne. Tout comme un miroir crée une image de soi même lorsque l'on se regarde
dedans, le réflecteur crée une image de l'antenne GPS. C'est la position de cette antenne virtuelle que l'on
risque alors de mesurer en lieu et place de la véritable antenne. Qui plus est, au fur et à mesure que le
satellite se déplace sur son orbite, l'angle d'incidence sur le réflecteur change, et l'image se déplace
d'autant. C'est donc finalement la position d'une antenne virtuelle mobile que l'on mesure ! Compte tenu
de la complexité des calculs correctifs qu'il faudrait effectuer, il n'y a pas vraiment de remèdes aux
problèmes des multitrajets. Un "blindage" des antennes contre les réflections parasites est toujours
possible, mais celui-ci ne peut être que partiel puisqu'il faut bien que le vrai signal parvienne à l'antenne.
La seule solution consiste donc à essayer d'éviter les multitrajets (c'est à dire les objets parasites) autant
que faire ce peut, ce qui n'est pas si facile quand on considère que le sol lui même est un réflecteur
potentiel !
la position du centre de phase des antennes GPS
Lorsque l'on mesure la position d'une antenne GPS, que mesure-t-on vraiment ? En fait, le coeur
d'une antenne GPS est constitué d'une spire de fils conducteurs (un solénoïde) qui à pour mission de
convertir l'onde électromagnétique en signal électrique. C'est la position du point même où la conversion
ce fait, que l'on nomme centre de phase de l'antenne, qui est donc mesurée. Malheureusement, ce point
n'est pas matériellement définit, c'est un point "virtuel" dont la position dépend de l'incidence de l'onde
par raport au solénoïde, c'est à dire par raport à l'antenne elle même. Le centre de phase, et donc la
position mesurée de l'antenne, peut ainsi ce déplacer de plusieurs centimètres, en fonction de l'élevation
et de l'azimuth des satellites que l'on reçoit.
Là encore, l'erreur de positionnement sera d'autant plus faible que les décalages introduits se
compenseront en moyenne grace à la bonne répartition spatiale des satellites. Néanmoins, les satellites
ne couvrant que la demi-sphère supérieure, un décalage systématique de l'altitude de la station est
inévitable. En pratique, on résoud la difficulté en utilisant toujours des antennes identiques, orientées
dans la même direction, ce qui annule le décalage sur la différence entre les altitudes de deux stations.
Là encore, on est ammené à faire du positionnement différentiel.
Il n'est pas impossible de connaitre à l'avance la "carte" des déplacements du centre de phase
d'une antenne donnée en effectuant des mesures en laboratoire. Néanmoins, de telles mesures sont très
délicates, et cette possibilité est encore en phase d'étude à l'heure actuelle.
La tectonique des plaques mesurée par GPS
L'hypothèse de Wegener de la dérive des continents a été confirmée depuis une trentaine
d'années par un nombre d'observations géophysique. Parmi celles ci, la plus flagrante est sans nul doute
la découverte de l'existence de bandes dans les planchers océaniques, "marquées" par un champ
magnétique dirigé alternativement vers le Nord et vers le Sud. Ces bandes, parallèles à la dorsale,
proviennent de l'aimantation rémanente du champ magnétique terrestre, piégé dans les roches
magnétiques au moment de leur refroidissement, c'est à dire peu après leur sortie de la dorsale. La
polarité du champ terrestre s'inversant plus ou moins régulièrement au cours du temps, on obtient cette
"peau de zèbre",preuve de l'expansion des fonds océaniques et donc de la tectonique
des plaques.
Des estimations de la vitesse de cette dérive des continents ont pu être produites à partir de la
datation de ces bandes et de leur largeur. De manière similaire, il est possible d'estimer le décalage des
deux moitiés d'une structure coupée par une faille (typiquement un ancien volcan, ou le lit d'une
ancienne rivière). Là encore, la datation de l'évènement fournira une estimation de la vitesse le long de la
faille en question.
L'inconvénient majeur de toutes ces méthodes réside dans le fait qu'elles fournissent une
estimation moyennée sur les temps géologiques. Les vitesses des déplacements présents pouvant être
sensiblement différentes, il était indispensable de pouvoir mesurer la vitesse instantanée des
déformations actuelles. Parmi tous les outils géodésiques terrestres et spatiaux dédiés à cette tâche
(théodolithes et distancemètres "classiques",VLBI, SLR, LLR, DORIS, ...), le GPS est particulièrement
bien adapté à la mesure de la déformation dans une zone donnée. Grâce à sa grande précision, à son
relativement faible coût, à sa facilité de mise en oeuvre, à la possibilité qu'il offre de mesurer des points
sans visibilité, il est possible de faire rapidement et à moindre coût un grand nombre de mesures sur une
zone donnée.
Le principe est simple. Un point est matérialisé par un repère géodésique, en général une broche
métallique enfoncée dans un affleurement rocheux solidement lié au substratum. A l'aide d'un trépied
associé à un viseur optique, ou bien en boulonnant directement, il est possible de placer l'antenne GPS exactement à la vertical du centre du
repère, à une hauteur déterminée. La mesure GPS de la position de l'antenne fournit alors la position du
repère. Il suffit de mesurer à nouveau la position de ce repère quelques temps après pour detecter un
déplacement et en déduire une vitesse. La déformation dans une zone considérée est donnée par la
mesure des déplacements d'un certain nombre de points répartis sur la zone considérée. Cet ensemble de
points constitue un réseau géodésique. En pratique, compte tenu de l'obligation de faire des mesures
différentielles et de l'obligation de faire des mesures suffisemment nombreuses et durant assez
longtemps, il est nécessaire de mesurer les points du réseau simultanément pendant plusieurs heures,
voire plusieurs jours. Typiquement on effectuera une mesure toutes les 30 secondes, pendant 3 jours,
sur tous les satellites visibles à chaque instant. Cela représente une moyenne de 30000 à 40000 mesures
par point. Evidemment, le temps de mesure est conditionné par la précision requise. Pour une précision
de quelques centimètres, il sera suffisant de mesurer pendant une durée de l'ordre de l'heure.
Autres applications
Le GPS est un formidable outil de positionnement, et le simple fait de pouvoir mesurer la
position d'un point à la surface de la Terre avec une très grande précision ouvre la voie à grand nombre
d'applications.
la surveillance d'une faille active
Tout naturellement, les américains furent les premiers à envisager l'application du système GPS
à la géophysique. D'autre part, l'une des préocupations majeure des pouvoirs publics en la matière est
l'étude du risque sismique en Californie. Dans cette région du monde, le coulissement de deux plaques
tectoniques le long de la faille de "San Andreas" provoque régulièrement des séismes dévastateurs,
comme ceux de San Francisco et Los Angeles dernièrement. En mesurant la positions de points répartis
de part et d'autre de la faille, et les mouvements de ces points au cours du temps, il est possible de
cartographier celle ci précisemment. L'analise de la déformation de la surface du sol dans la région de la
faille donne des informations sur la profondeur de la fracture, la longueur des segments actifs, les zones
où le risque de séisme est le plus important, etc.
D'autre part, après un séisme, la mesure GPS donne accès au déplacement total du sol occasioné par
celui ci. Cette information est particulièrement utile pour la compréhension des mécanisme
fondamentaux de la rupture sismique. Enfin, il est meme possible de mesurer la position de points GPS
pendant un séisme. En calculant la position du point à chaque mesure, on peut litéralement voire le point
se déplacer pendant les quelques dizaines de secondes que dure le tremblement de Terre. Si ces points
sont bien répartis, on peut également voire la rupture se propager le long de la faille. Là encore, toutes
ces informations permettent d'analiser la propagation des ondes sismiques, et les mouvements de la
surface qui en résultent. Ce type de réseau est maintenant mis en place autour d'un grand nombre de
failles actives de part le monde : au Japon, en Indonésie,
en Birmanie, ou encore en Turquie.
la déformation des volcans
De la meme façon, il est possible de surveiller la déformation du cône d'un volcan en activité.
avec quelques points GPS judicieusement placés et mesurés en continu, on peut suivre jour après jour
les déformations dues à la monté de lave. Ces mesures sont utiles aux volcanologues pour quantifier les
phénomènes associés à une éruption. On peut également imaginer acquérir un pouvoir de prédiction, une
fois ces phénomènes bien connus. Actuellement, de telles mesures sont en cours sur différents volcans
tels que le Piton de la fournaise en Martinique, la Soufrière en Guadeloupe, ou le Merapi en Indonesie.
le rebond "post glaciaire" et ses implications sur le changement global
Depuis un certain nombre d'années on soupçonne que le niveau des mers est en constante, bien
que très faible, augmentation (quelques millimètres par an au plus). Comme elle se conjugue avec des
mouvements verticaux des continents du même ordre de grandeur (voire plus impportant), cette
éventuelle montée des mers est très difficilement mesurable. Par contre, l'hypothèse a été émise que la
source de cette monté provienne de la "fonte" de la calotte glaciaire antarctique, liée au réchauffement
global de la planète. Ors, les conséquences d'une telle perte d'eau sont mesurables. En effet, si la masse
de la calotte polaire diminue, le continent qui la soutient monte au fur et à mesure que sa charge
diminue. C'est le phénomène du rebond post-glaciaire bien connu en Europe du Nord ou au Canada. Il
est parfaitement possible de mesurer par GPS une surrection du continent antarctique. De telles mesures,
bien que très difficiles ont déjà commencé (Antarctique), et les résultats préliminaires sont impressionants.
la mesure du géoïde
A cause des anomalies de densité et de forme de la planète, le champ de gravité de la terre n'est
pas celui d'une sphère homogène applatie aux poles. Au contraire il présente des maxima et des minima
suivant que les roches en surface et en profondeur sont plus ou moins denses, et le relief plus ou moins
accentué. Là où la surface terrestre est couverte par les océans, l'eau qui est liquide s'amasse librement
là où la gravité est la plus forte, pour s'équilibrer à un niveau où la gravité est constante. La surface
ondulée ainsi crée s'appelle le géoïde. Bien entendu, le géoïde existe également à la surface des
continents, bien qu'il ne soit pas matérialisé par la présence de l'eau.
La connaissance du géoïde est de première importance en géophysique. En effet, le champ de
gravité est affecté entre autres par les masses profondément enfouies dans le manteau terrestre. L'étude
des anomalies du géoïde fournit donc une indication sur la composition de l'intérieur de la Terre, alors
que les foragesles plus profonds ne dépassent guère les 10 km.
Au dessus des océans, le géoïde est connu grace aux satellites altimétriques qui mesurent tout
simplement les variations dans l'espace de la hauteur de la surface moyenne de l'eau (abstraction faite
des vagues et des marées). Toutefois, et justement parcequ'il n'est pas matérialisé au dessus des surfaces
solides, le géoïde continental reste difficile à mesurer. Ors le GPS, parcequ'il a comme référence des
satellites qui orbitent par rapport au centre de masse de la Terre, donne la position d'un point dans ce
référentiel. C'est à dire que l'on connait la distance entre un point GPS et le centre de la Terre. Il suffit
alors de connaitre l'altitude de ce point (c'est à dire la hauteur par rapport au niveau des mers), et la
différence entre les deux est tout simplement le géoïde.
la mesure de l'érosion
Enfin, on peut envisager d'utiliser le GPS d'une manière légerement différente. Il s'agit là d'une
application qui se rapproche de la navigation, tout en conservant le principe de la mesure de phase, qui
seul autorise une assez grande précision. En effet, à condition d'effectuer des mesures suffisemment
raprochées, il est possible de suivre la trajectoire d'un récepteur mobile. Chaque mesure donne alors la
position (latitude, longitude, altitude) en fonction du temps. Comme on ne dispose que d'une seule
mesure (sur plusieurs satellites) à chaque instant, la position du récepteur n'est connu qu'avec une
précision dégradée. Néanmoins, la position du récepteur à un instant donné est liée à sa position à
l'instant précédent et à l'instant suivant par l'intermédiaire de sa vitesse. Il est donc finalement possible
de reconstituer la trajectoire du récepteur avec une précision inférieure à la dizaine de centimètres. Dans
ces conditions, il est possible d'établir rapidement une carte topographique (altitude en fonction de
latitude et longitude) précise d'une zone balayée par un récepteur GPS se déplaçant sur une voiture ou à
dos d'homme par exemple. Ceci est particulièrement facile à réaliser sur le littoral, où l'on peut
cartographier ainsi la topographie du cordon dunaire et celle de l'espace intertidal découvert entre les
marées (ou estran)(Merlimont). Il est même possible de mesurer la topographie des bancs sableux sous marins en
véhiculant le récepteur GPS sur un bateau d'où l'on mesure la profondeur avec un sonar. Il suffit de
mesurer ces topographies à intervalles réguliers, ou après une tempête, pour litéralement voire les effets
de l'érosion lente ou catastrophique, ainsi que les échanges entre les différents réservoirs et les chemins
parcourus par la matière.
Encarts
1-Les codes de pseudo-distance et la politique d'accès au système
Il y a donc deux types de pseudo-distance qui autorisent des précisions différentes:
le code C/A pour "Coarse Acquisition", rendu disponible à tout utilisateur, qui autorise une
précision de l'ordre de la centaine de mètres. C'est le code utilisé dans les récepteurs
disponibles dans le commerce et utilisés aussi bien pour la navigation des avions de ligne,
des navires marchands et de plaisance, ou encore des taxis parisiens.
le code P pour "Precise", crypté pour empêcher son utilisation par tout autre que l'armée
américaine, qui autorise une précision de l'ordre de la dizaine de mètres. Destiné à être
désactivé en temps de paix, ce dispositif connu sous le nom de "Anti Spoofing" est en fait
opérationnel et activé en continu depuis début 1994.
Toujours dans le but d'empêcher le positionnement trop précis d'éventuels "hostiles", le système est
pourvu de capacité de diminution de la précision. Cet objectif est atteint en dégradant artificiellement
la précision d'un certain nombre des informations émises par les satellites. Pour chaque chiffre que
l'on souhaite dégrader, les derniers "bits" informatiques donnant les dernières décimales sont
"aléatoirement" inversés deux par deux selon une clef secrète. Les quantités concernées sont d'une
part les horloges des satellites qui donnent l'instant d'émission du signal, et d'autre part les orbites
des satellites qui donnent la position du point d'émission du signal. Ce dispositif est connu sous le
nom de "Selective Availability". En pratique, il est possible de contourner cette difficulté en ayant
recours au GPS différentiel. Cette technique consiste à disposer d'une station fixe dont la position est
connue à l'avance avec une grande précision. A chaque instant, la différence entre position mesurée
et position vraie est alors réémise "en clair" par radio comme une correction valable dans toute la
zone de la station fixe.
2-Les mesures sur la phase de l'onde porteuse
la longueur d'onde, ou taille caractéristique du signal, passe de 30 m pour le code C/A et 3 m pour le
code P, à 19 cm pour l'onde porteuse du premier et 24 cm pour l'onde porteuse de second. Comme il
est possible de faire une mesure au niveau d'une fraction de la longeur d'onde, on conçoit aisément
qu'il soit possible d'atteindre une précision centimétrique.
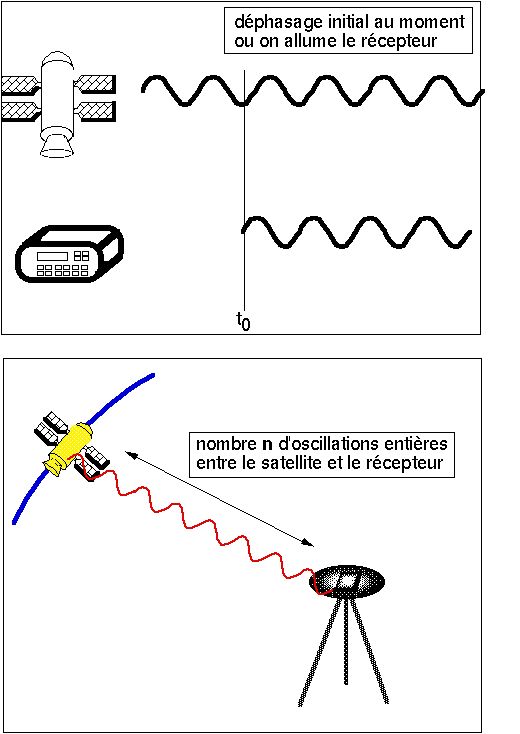
Toutefois, cette technique, présente un inconvénient majeur. En effet, contrairement à la mesure sur le
signal codé, la mesure sur l'onde porteuse est dite fondamentalement ambigüe. Alors que des codes
toujours différents, et donc identifiables, se succèdent en continu, rien ne permet de distinguer une
oscillation de l'onde à un instant donné de l'oscillation immédiatement suivante ou précédente. En
d'autres mots, on ne connaît pas le nombre d'oscillations qui séparent le satellite de la station, mais
seulement le nombre d'oscillations qui séparent deux mesures effectuées sur le même satellite à deux
instants différents. On n'a donc pas accès directement à la distance qui sépare le satellite de la
station, et on ne peut donc connaître la position de la station en temps réel. Par contre, après avoir
effectué des mesures en continu sur tous les satellites visibles pendant un certain laps de temps, on
dispose d'un jeux de nombreuses équations (autant que de mesures), pour un nombre relativement
petit d'inconnues (trois pour la position de la station, et une pour chaque distance satellite-station à
la première mesure). La technique consiste donc à enregistrer un grand nombre de mesures sur le
terrain, puis à résoudre les équations à l'aide d'un ordinateur une fois de retour au laboratoire.
D'autre part, pour éliminer les effets néfastes de la "selective availability" il est nécessaire de
combiner les données provenant de différentes stations (c'est le principe du GPS différentiel). On
parvient alors à éliminer les erreurs provenants des horloges des satellites, au prix de la perte de la
notion de positionnement absolu. On ne connaît plus que les distances qui séparent les stations au
lieu de leur position. En géodésie, ces distances sont nommées "lignes de base", et comportent trois
composantes : une composante verticale qui correspond à la différence d'altitude entre les stations, et
deux composantes horizontales que sont les distances selon les directions Nord-Sud et Est-Ouest dans
le plan de la surface terrestre.
3-Le coût des récepteurs GPS
Un récepteur grand public servant à la navigation sera doté uniquement de la capacité de mesure de
la pseudo distance non précise sur une seule longueur d'onde. On trouve de tels récepteurs à partir de
1500 FF ou 300 USD. A l'opposé, les récepteurs bi-fréquence, dotés des capacités de mesures sur les
deux pseudo-distances et sur les deux ondes porteuses, coûtent jusqu'à 150000 FF ou 30000 USD. Il
existe une catégorie intermédiaire de récepteurs, qui permettent un positionnement relativement
précis sans être trop onéreux. Ce sont les récepteurs mono-fréquence, qui ne mesurent que la pseudo
distance et la phase d'une seule des deux ondes GPS.
 fichier PostScript
fichier PostScript
 Retour au sommaire
Retour au sommaire
{kind=link}